Contacts in LD
According to →IEC-standard: A contact is an element which imparts a state to the horizontal link on its right side which is equal to the Boolean AND of the state of the horizontal link at its left side with an appropriate function of an associated Boolean input, output, or memory variable. A contact does not modify the value of the associated Boolean →variable.
See under "Link elements (lines) and their states in LD" for more information about the state of links.
Neuron Power Engineer provides the following types of contacts (depending on the →POU type):
|
Name |
Symbol |
Meaning |
|---|---|---|
|
Normally open contact |
|
The state of the left link is copied to the right link, if the state of the associated Boolean variable (= |
|
Normally closed contact |
|
The state of the left link is copied to the right link, if the state of the associated Boolean variable (= |
|
Positive transition sensing contact |
|
The state of the right link is
|
|
Negative transition sensing contact |
|
The state of the right link is
|




Representation
Symbolic representation:

Each contact provides 3 input fields above the contact symbol:
-
Description (=
[Description]in the upper illustration): Here you are able to enter a description for the contact. If you do not enter any text, this field is hidden. Only when you position the mouse pointer over the contact, the field becomes visible so that you are able to enter a text. -
Tag (=
[Tag]in the upper illustration): If you do not enter any text, this field is hidden. Only when you position the mouse pointer over the contact, the field becomes visible so that you are able to enter a text. -
Associated variable (=
Var1in the upper illustration): Here you are able to associate a variable to the contact. By default, theENOoutput is entered as the associated variable.
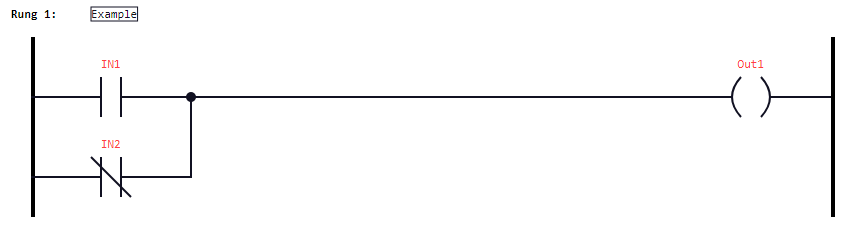
Example for a rung with 2 contacts and one coil: